|
Jojonase
|
Annexe I |
|
____
Le
transfert optique
Notions de base
____
|
|
Les méthodes
Les deux méthodes
généralement employées pour transférer des images du projecteur de cinéma
vers le caméscope vidéo sont la très classique méthode de l’écran matériel
et celle, plus élaborée, de l’écran virtuel par loupe et miroir. Nous nous
bornerons ici à une simple mention des procédés de lecture directe sur le
film à l’aide de dispositifs macro, qui font appel à du matériel
semi-professionnel sortant du cadre de ce tutoriel.
|
|
L’écran matériel |
|
 |
|
La figure 1 donne le schéma du transfert sur écran matériel. Le caméscope
est placé au plus près du projecteur, l’écran à une position assez proche
pour que l’intensité de son éclairement soit suffisante, assez loin pour que
les effets de parallaxe puissent être négligés, en gros entre 50 cm et 1m,
50. Il appartient à chacun, compte tenu des caractéristiques de son
matériel, de procéder aux essais permettant d’obtenir la disposition la plus
satisfaisante. L’adjonction à l’objectif du caméscope d’une lentille
d’approche de 1 ou 2 dioptries permet, sans incidence perceptible sur la
qualité des images, d’utiliser un écran de dimensions restreintes et donc
mieux éclairé. Une double mise au point est nécessaire, de préférence en
s’aidant d’un moniteur de contrôle:
- en premier, mise au point du caméscope sur
l’écran (par exemple sur un fil mince tendu en travers) et blocage en
« manuel » de la mise au point vidéo ;
- ensuite mise en route du projecteur et mise au
point de l’image à transférer.
Outre le mérite de la
simplicité cette méthode présente celui de ne pas obérer l’image de pertes
de pouvoir de résolution ou d’équilibre chromatique (le papier photo blanc
mat pour imprimante est un excellent support). Ses inconvénients résultent
de la dispersion dans l’espace d’une part importante de la lumière
réfléchie provoquant une perte sensible du contraste ainsi qu’un effet de
vignetage important.
Ces effets peuvent être en
partie compensés de la façon suivante.
a) orientation de
l’écran de façon à mieux diriger le lobe de réflexion vers le caméscope :
écran placé sur l’axe lumineux du projecteur, image préalablement bien
cadrée puis éteinte, caméscope dirigé vers le centre de l’écran, on plaque
un miroir plan ordinaire sur l’écran et on l’oriente pour que l’image de
l’objectif du projecteur apparaisse bien au centre de l’image vidéo .
b) réalisation d’un
écran en dégradé de gris du centre vers les bords : on prend une vue du
cadre éclairé (sans film) en fermant fortement le diaphragme du caméscope,
on l’exporte vers un logiciel de traitement photo et on inverse noir et
blanc pour obtenir un négatif exact dans son modelé de la répartition de
lumière ; plusieurs essais sont évidemment nécessaires pour déterminer le
meilleur dosage du gris. (si on change la lampe il faut refaire un écran…).
|
|
L’écran virtuel
La méthode de l’écran
virtuel par loupe et miroir, dont le principe est présenté sur la figure 2,
est plus délicate à mettre en œuvre, mais présente l’avantage,
particulièrement intéressant s’agissant d’images 8 et S8 de petites
dimensions et donc de faible pouvoir de résolution, de présenter au
caméscope des images d’une luminosité brillante et surtout d’un contraste
nettement amélioré. On sait en effet qu’un couple contraste – luminosité
bien équilibré rétablit l’impression subjective de netteté que
pourrait faire perdre l’altération de résolution inhérente à tout passage
par les diverses optiques du transfert, objectif de projection, loupe de
concentration, objectif caméscope…
|
|
 |
|
Dans ce dispositif il convient de considérer en premier l’axe principal sur
lequel sont centrés, de la gauche vers la droite, la lentille de sortie P
du projecteur, le cône du faisceau lumineux, l’image I formée dans
l’espace par le projecteur, la loupe L (sur laquelle est figurée la
trace du faisceau), le cône inversé du faisceau réfracté, la lentille
d’entrée V du caméscope. La loupe a deux fonctions distinctes :
a) concentration du
faisceau lumineux vers la vidéo en donnant au cône entrant dans le
caméscope un angle au sommet compris dans les limites du zoom .
b)
constitution à partir de l’image I formée par le projecteur d’une
nouvelle image I’ sur un écran fictif E géométriquement situé
dans les limites de mise au point du caméscope.
L’image I est une
image « réelle » (que l’on pourrait visualiser sur un écran matériel), non
visible dans ce montage.
L’image I’ peut être
située en deçà (comme sur la figure) ou au delà de la loupe. Elle est vue à
l’envers depuis le point V, et donc inversée dans le sens droite –
gauche. Le miroir M en donne une image virtuelle I’’ redressée
et crée à partir de l’écran immatériel E un écran virtuel E’
en face duquel sera placé le caméscope (V’) pour une prise de vue
normale de l’image argentique.
Du fait de la symétrie
introduite par le miroir les distances ME et ME’, MV et
MV’, LMV et LMV’ sont égales deux par deux. Pour des
raisons de commodité nous conduirons l’étude théorique du système à loupe en
ignorant dans un premier temps l’existence du miroir, et donc en supposant
que les trois composants, projecteur, loupe et caméscope ainsi que les
images et écrans sont alignés sur l’axe optique principal,. Ceci ne change
aucune des données fondamentales du système.
Nota : sur la
figure est symbolisé en vert un « Plan de référence ». C’est
le plan auquel doivent impérativement être parallèles :
- les bords haut et
bas du cadre de l’image I
- les axes OO’
et MV’ (ainsi donc que l’axe optique de la loupe)
et
perpendiculaires :
- les bords droit
et gauche de l’image I
-
le plan principal de la loupe et le miroir
|
|
Données de mise en place
Note préliminaire
L’étude théorique de tout
système optique est c onduite suivant les règles de l’optique géométrique
dites Lois de Descartes. Ces règles et les formules mathématiques sur
lesquelles elles s’appuient reposent sur des simplifications importantes :
assimilation à des points et des droites « sans dimension » des sources
élémentaires émettrices ou réflectrices de lumière (taches colorées, grains
argentiques, pixels…) et des faisceaux de photons qu’ils émettent (ainsi
bien entendu que les taches ou faisceaux « image » obtenus après passage par
les instruments), représentation des lentilles par des plans circulaires
sans épaisseur, non prise en compte des variations de distances focales
suivant la fréquence et donc la couleur de la lumière, etc. On doit donc
considérer ces règles comme un moyen de compréhension des phénomènes
et leurs résultats comme une indication sur les ordres de
grandeur des données de mise en place des appareils.
Seule
l’expérimentation préalable et les tâtonnements qu’elle implique peuvent
donner les bonnes valeurs correspondant aux caractéristiques des outils dont
on dispose.
Pour clarifier cet exposé
théorique on étudiera séparément et successivement les deux fonctions de la
loupe utilisée en transfert.
|
|
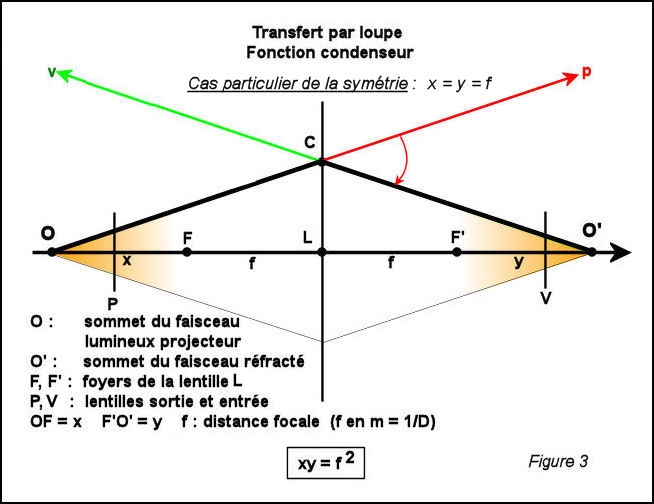
Fonction de concentration
La figure 3
en montre le principe : elle représente le dispositif vu en plan. Le point
O représente le sommet (fictif) du cône lumineux issu de l’objectif
P. Le segment Op et le segment réfracté O’v, qui se coupent en
C sur la loupe L, correspondent donc aux rayons passant par
l’un des petits cotés de l’image. O’ est le sommet du cône convergent
après traversée de la loupe. Les points F et F’ sont les
foyers objet et image : la distance focale est f = FL = LF’.
|
|
 |
|
La convergence est
assurée quand ces 5 points sont strictement disposés dans l’ordre O, F, L,
F’, O’, le point O’ étant l’image du
point O (O et O’ sont dits conjugués).
Si x est la distance
OF, y la distance O’F’, les lois de Descartes
s’expriment par la relation
[1]
xy = f2
[1] C’est sous une autre forme, la
relation classique 1/p + 1/p’ = 1/f
La configuration choisie
pour cette figure est celle qui assurerait les meilleures conditions de
convergence dans l’encombrement minimum : la distance x est égale à
f, ce qui implique que y est également égale à f et que
les parties de l’image situées de part et d’autre de la loupe sont
symétriques. L’angle de déviation
pCO’ est minimum et pour tout rayon du faisceau l’incidence d’entrée sur
la loupe est égale à l’incidence de sortie, ce qui assure un niveau minimal
d’aberrations. Elle suppose malheureusement pour être réalisable que la
loupe soit d’une dimension prohibitive. Il est néanmoins souhaitable de s’en
rapprocher le plus possible en plaçant la loupe à la plus grande distance du
projecteur compatible avec la nécessité de n’utiliser qu’au plus les 8/10 de
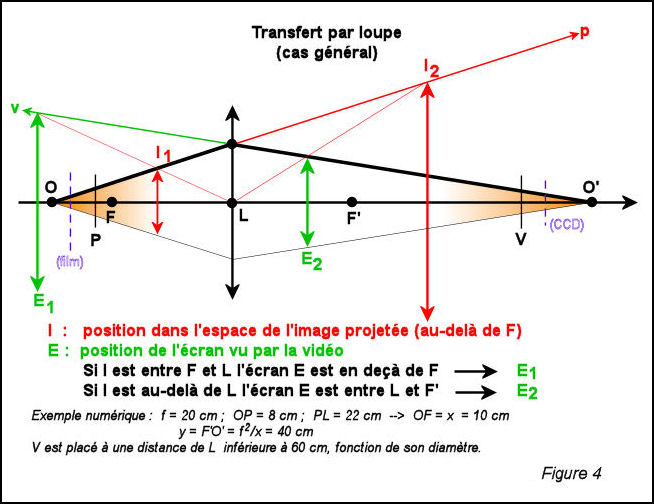
la surface de la lentille. On se place alors dans le cas de la figure 4. On
doit toujours avoir impérativement F placé entre O et L ;
x étant réduit la distance y augmente, obligeant donc à
éloigner le caméscope de la loupe.
|
|
 |
|
Fonction écran
La même
figure peut être utilisée pour construire facilement la position de l’écran
E (cf. figure 2). On peut remarquer en effet que puisque O’
est l’image de O et que le point C de la loupe est
nécessairement sa propre image, tous les points situés sur la droite Op
ont leur image sur la droite vO’. Par ailleurs, règle fondamentale de
l’optique géométrique, tout rayon passant par le centre L de la loupe
ressort sans être dévié. Si donc le point I de la droite Op
est l’image donnée par le projecteur d’un point de l’image ciné situé en
bord du cadre, son image, (celle d’un côté de l’écran E), est à
l’intersection de la droite LI avec le segment vO’. On
remarquera que la molette de mise au point du projecteur définit en fait la
position dans l’espace de l’image finale, sur laquelle la mise au point doit
être faite par le caméscope.
La figure
donne deux positions possibles E1 et E2
de l’écran E, suivant que l’image I donnée par le projecteur
se trouve en deçà ou au-delà de la loupe L. Vues du caméscope ces
deux images ont strictement les mêmes caractéristiques : même flux lumineux,
même angle de zoom. Seules différent les distances de mise au point vidéo.
Les essais préliminaires doivent permettre de déterminer la position donnant
la meilleure image et le minimum d’aberrations. |
|
Les contraintes
Choix
de la loupe
La première
contrainte rencontrée lors du choix des matériels et de leur mise en place
est la définition d’une convergence convenable et donc de la vergence V
(en dioptries) de la loupe.
Les
caractéristiques « zoom » des caméscopes grand public conduisent à
préconiser :
- pour le projecteur, longueur de focale égale ou
supérieure à 25 mm
- pour la loupe, vergence aux alentours de 4
dioptries.
Une
vergence plus faible (3D) présente en principe un niveau plus faible
d’aberrations, mais au prix d’un encombrement plus grand du dispositif et
aussi d’une certaine difficulté à entrer dans le domaine d‘un zoom 10X, sauf
à adopter une lentille trop grande (une 3D de 17 cm de diamètre a une
épaisseur en son centre de 2 cm au moins et perd ainsi les avantages qu’elle
pourrait avoir sur une 5D de plus petit diamètre, nettement moins épaisse).
Une vergence plus forte (5D) permet un gain de place substantiel et autorise
sans problème l’emploi des camésco pes à zoom 10X. Son diamètre doit
être de l’ordre d’une douzaine de cm afin d’éviter au faisceau lumineux de
trop en « tangenter » les bords.
|
|
Emplacement de l’écran virtuel
La
constitution de l’écran virtuel a ses propres contraintes liées aux
distances minimales de mise au point du projecteur et du caméscope. En
effet, plus on met au point loin du projecteur, plus l’écran virtuel se
rapproche du caméscope. On risque donc de se trouver confronté à
l’impossibilité de placer cet écran dans les limites d e mise au point de la
vidéo. Forcer une mise au point rapprochée du projecteur en imposant un
tirage hors limite n’est pas conseillé, car l’objectif, optimisé pour une
projection à distance normale d’écran, perd de ses qualités hors du domaine
défini par le constructeur. En revanche l’adjonction au caméscope d’une
bonnette d’approche de faible puissance (1 dioptrie, à la rigueur 2) est
parfaitement envisageable. S’agissant d’images planes, le peu d’aberrations
que pourrait éventuellement introduire cette lentille additionnelle reste
négligeable devant le gain en qualité obtenu en ramenant l’image fournie par
le projecteur dans ses limites les plus convenables.
|
|
Précision de montage de la loupe
Lors du montage de la lentille il convient de porter une attention
toute particulière à la concordance de son axe optique avec l’axe
d’alignement prévu, qui reliera les 3 centres : de l’image ciné – de la
loupe – de l’image vidéo, le tout en parallélisme avec le plan de référence.
|
|
 |
|
La figure 5 montre qu’une fois le monta ge réalisé la mise
en alignement de ces 3 centres, quel que soit le procédé utilisé et
aussi précis soit-il, ne permet pas de vérifier la perpendicularité de la
lentille sur cet axe. En effet, avec une lentille simple l’image d’un point
m de l’axe reste pratiquement au même endroit m’, que l’axe
optique de la lentille soit ou non confondu avec l’axe des centres. Or un
décalage de 1 mm du bord d’une lentille de 6 à 7 cm de rayon correspond à un
écart de 1 degré de son axe optique, angle à partir duquel des aberrations
peuvent apparaître en bord d’image (sauf à disposer de lentilles
achromatiques de très bonne qualité, plutôt chères). A défaut d’utiliser une
méthode optique particulière pour ce réglage de perpendicularité il
convient, dès la construction, de veiller à placer au mm près la lentille
dans son cadre.
|
|
Mise
en place du miroir
La seule
contrainte concernant le miroir est le réglage de sa perpendicularité au
plan de référence, afin d’assurer après réflexion le parallélisme de
l’axe des centres à ce même plan. Sa position sur l’axe, ainsi
d’ailleurs que l’angle qu’il forme avec lui, sont indifférents du moment
qu’il est placé entre le projecteur et la caméscope. Chacun, en fonction des
caractéristiques de son matériel, choisira la place et l’orientation du
miroir qui lui paraîtront les plus convenables.
|
|
Les
essais préliminaires
Avant de se
lancer dans la mise en place définitive et notamment dans la construction de
l’ensemble loupe-miroir, il est fortement conseillé de faire une série de
transferts d’essais « en ligne », sans miroir, avec une mise en place
provisoire aisément modifiable. Ces essais permettront de déterminer
notamment le meilleur couple de distances « projecteur – loupe » et « loupe
– caméscope », ainsi que le meilleur emplacement de l’écran immatériel dans
le champ de mise au point du caméscope.
|
|
|
Jojonase
|
Annexe II |
|
|
|
Le
transfert à deux lentilles
(doublet) |
|
Le transfert en doublet - avantages et inconvénients
Les avantages d’un montage à deux lentilles sont mis en
évidence par la figure 6, qui reprend en grisé le schéma de la figure 3 de
l’annexe 1 et montre en superposition comment passer de la loupe unique au
doublet. Une lentille L’ identique à celle du montage simple L
est placée au foyer objet F de celle-ci. Les deux lentilles sont
distantes l’une de l’autre de f, distance focale commune. La source
apparente O du faisceau lumineux se retrouve au foyer objet de L’,
alors que L est à son foyer image. Après une première réfraction les
rayons sortent parallèles à l’axe principal puis convergent après la
deuxième vers F’, foyer image de L. On reste donc dans un
montage parfaitement symétrique avec tous les avantages du premier, mais sur
un espace considérablement restreint
|
 |
|
Le doublet ainsi constitué a la même vergence que chacune des lentilles
considérée seule,
ce qui se traduit pour les faisceaux entrant et sortant par la même
ouverture que dans le montage à une lentille, et donc par le même
coefficient de zoom pour le caméscope. |
|
La formule générale est V = V1 + V2 - e.V1
.V2 avec V, V1 ,V2
en dioptries et e, espace entre lentilles, en mètres.
----------------------------------
|
|
Le principal avantage du montage est le gain de place bien
sûr, mais aussi la possibilité d’utiliser des lentilles de diamètre plus
faible, moins chères à qualité égale. Le doublet étant plus près des
objectifs du projecteur et du caméscope la meilleure place pour le miroir
est entre les deux lentilles, ce qui permet de réduire encore l’encombrement
du banc et de faciliter sa mise en place
|
|
Ce type de doublet (1, 1, 1, soit distances focales et
espacement égaux) a de plus la propriété de réduire de manière significative
les aberrations propres à une seule lentille.
|
|
Son inconvénient majeur résulte de la nécessité d’un
alignement aussi parfait que possible des axes optiques de l’appareil :
entre eux d’abord puis avec ceux des appareils extérieurs. Or à cet égard la
présence d’un miroir – souhaitable, le retournement par réflexion des
images, qui n’en sont pas altérées, est plutôt préférable au retournement
par logiciel – complique le problème. Doublant les angles, le miroir en
effet double les conséquences des erreurs de calage.
|
|
L’intérêt de
l’adoption du doublet dépend fortement de la qualité du matériau de base
dont on dispose. La pellicule la plus commune à transférer est le Kodachrome
40. Ses caractéristiques intrinsèques publiées par l’industriel la dotent
d’un pouvoir de résolution de 80 l/mm (valeur moyenne et la plus probable en
un point donné, rappelons-le) soit 160 points/mm. La définition horizontale
en S8 est donc en théorie de l’ordre de 850 à 900 points. Mais cette qualité
est rarement atteinte en cinéma d’amateur, qui a plutôt des résolutions de
120 à 140 points/mm, en compatibilité de définition quasi parfaite avec les
720 points du MiniDV. On pourrait penser que le chaînon faible en transfert
par condenseur est la loupe, instrument le plus simple qui soit. Or la
détérioration d’image qu’elle provoque est relativement limitée : faisceau
lumineux étroit, faible puissance et donc faible courbure, faible incidence
des rayons qui la frappent produisent un taux de distorsion relativement
bas, surtout sensible en bord d’image où se trouve rarement le sujet
principal d’un film d’amateur (si le zoom du caméscope en permet
l’utilisation une 3 dioptries est toujours préférable à une 5). Le transfert
en loupe simple est donc en général largement suffisant pour le 8 mm et dans
la plupart des cas pour le S8 : si le montage de la loupe et le réglage du
miroir ont été faits avec soin, le maillon faible de la chaîne de transfert
est plus souvent le film à transférer que le condenseur. |
|
Le montage en
doublet peut en revanche être intéressant pour les très bons Super 8, et
surtout pour les pellicules de plus grande surface et de bonne qualité, et
donc de meilleure définition, telles les 9 et 16 mm.
|
|
Définition des caractéristiques d’un doublet
Plus encore que dans le cas de la lentille unique il est
indispensable de procéder à des essais préliminaires « en ligne »,
c'est-à-dire sans miroir, afin de déterminer les meilleurs paramètres de
construction, compte tenu des caractéristiques du projecteur et de celles du
caméscope que l’on compte utiliser.
|
|
La figure 7 montre diverses dispositions différant de la
position idéale mais pouvant se révéler plus performantes :
|
 |
|
Le schéma 7a est le montage de principe 1,1,1. Il reprend la
méthode de construction des images utilisée pour le montage à loupe unique :
le projecteur forme son image en 1, la première lentille la déplace
en 2 et la deuxième place l’écran virtuel en E.
|
|
Les schémas 7b et 7c correspondent à des vergences
résultantes légèrement différentes de celle des lentilles. On rappelle que
la vergence d’un doublet est donnée par la formule
|
|
V =
V1 + V2 – e.(V1 x V2) (V
en dioptries, e en m)
|
|
La disposition 7b peut être utile dans le cas où on utilise
des lentilles 3D (toujours préférables) avec un zoom limité à 10X.
Dans le cas tout à fait envisageable d’une 3D montée
avec une 5D on devra adopter l’un des montages 7b ou 7c. Les écartements
optimaux e sont les suivants :
|
|
3D + 3D : e = 0,33 m
5D + 5D : e = 0,20 m
3D + 5D : e = 0,26 m
|
|
Réalisation d’un plateau de transfert
|
|
L’architecture en est donnée par la figure 8.
|
 |
|
Le plateau
P est le plan de référence. Il supporte deux platines : E support
de la lentille d’entrée, S support de la lentille de sortie, ainsi
que le miroir M. L’axe principal de projection LL’ est
parallèle au plan P. Il entre par le centre c de la lentille,
se réfléchit en I et sort par le centre d. Sa projection
orthogonale sur le plan P se fait sur les deux droites Xx,
ligne de foi principale, et Yy, ligne de foi secondaire. LL’
part du centre de l’image portée par le film et aboutit au centre de l’image
reçue par le CCD : c’est la « ligne des centres » ;
les axes optiques des lentilles doivent se confondre avec
cette ligne et le miroir doit être rigoureusement perpendiculaire au plan
LIL’.
|
|
Si ces conditions sont remplies il n’y a pas d’autre
rayon entrant par c et sortant par d que celui de la ligne des centres :
cette caractéristique essentielle est la condition sine qua non d’une bonne
et facile mise en place finale du dispositif de transfert.
|
|
La réalisation du
plateau passera par les étapes suivantes :
|
|
- tracé
des lignes de foi principale et secondaire
- mise en place des platines
porte-lentille de façon que les centres c et d se projettent
orthogonalement sur les lignes de foi
- ajustement
des axes optiques des lentilles pour les rendre parallèles aux lignes de foi
- mise
en place et fixation du miroir pour que l’axe LcI se réfléchisse
strictement suivant IdL’.
|
|
Nota : tous les
principes exposés ici s’appliquent intégralement au cas du plateau de
transfert à une seule loupe, sous réserve que le centre c de la fenêtre de
sortie, fenêtre sans lentille, soit physiquement repérable.
|
|
Exemple de réalisation
|
|
Le plateau dont la réalisation est prise en exemple comporte
deux objectifs récupérés sur une jumelle 7 x 50 déclassée, de très bonne
qualité et assez vieille pour ne pas être teintée par un vernis
anti-réflexions de couleur agressive (qui les rendrait impropres à l’usage
prévu en imposant une dominante incontrôlable). Chaque objectif comporte
plusieurs lentilles, diamètre 50 mm et focale d’une vingtaine de cm
(dimensions compatibles avec un CCD 1/6’’)
|
|
Préparation
Les platines supports de lentille sont des rectangles de contre-plaqué
accolés et travaillés conjointement, les ouvertures circulaires ajustées à
la râpe d’un même mouvement : la position de leur centre n’est pas critique,
ce qui l’est c’est qu’elle soit strictement la même pour chacun d’eux et
donc qu’ils soient exactement superposables, faces internes en regard.
|
|
Le plateau (figure
9) est un carré de latté de 22 mm. Les deux axes Xx et Yy sont
prolongés sur les tranches par des tracés rigoureusement perpendiculaires au
plan principal. Les trois points 1, position sur Xx du milieu
avant de la platine d’entrée, 3, position sur Yy du point
correspondant de la platine de sortie, et 2 à l’intersection des
lignes de foi, sont chacun marqués par une courte pointe sans tête qui
serviront de pivot lors de la mise au point. Le plateau est posé sur une
surface plane sur laquelle est tracée une fine ligne droite longue d’environ
5 fois la distance focale des lentilles.
|
 |
|
Cette ligne prolonge la ligne de foi principale. Le plateau
est fixé en son milieu, marques de ligne Xx en coïncidence précise.
Les pieds de la ligne Yy permettent de tracer la ligne de foi
secondaire sur la surface de référence : la valeur de l’angle que font entre
elles Xx et Yy n’est pas critique mais en revanche il est
primordial que les deux tracés, l’un sur le plateau, l’autre sur la surface
de travail, soient rigoureusement l’image l’un de l’autre (longueur de Yy
environ 3f).
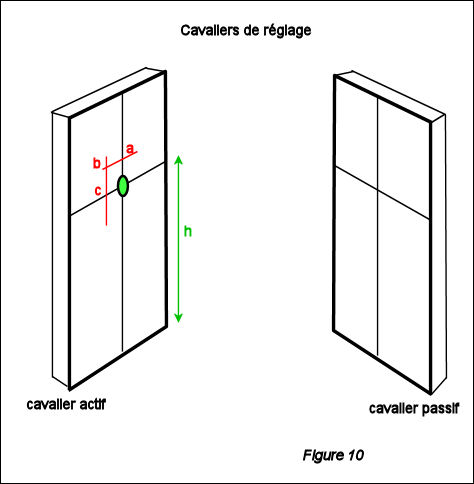
On réalise par ailleurs deux cavaliers, l’un actif, l’autre passif, outils
indispensables à l’ajustement optique de l’appareil (figure 10).
|
|
|
Ils sont constitués d’un écran portant deux axes dont l’un
est à la même hauteur h du plan de travail que le centre de la
lentille. Le pied de l’axe vertical sera mis en coïncidence avec l’une ou
l’autre des lignes de foi. Au croisement des deux axes le cavalier actif
présente une ouverture de 5 mm de diamètre dans laquelle est insérée une
diode LED affleurant la surface de l’écran. Deux axes secondaires ab
et bc sont de plus tracés sur ce cavalier à 7 ou 8 mm des axes
principaux. Il est conseillé, en vue de faciliter le calibrage ultérieur du
système, de retenir à la construction une hauteur h’ légèrement
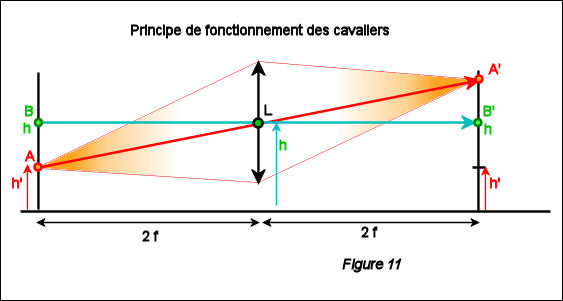
inférieure (de 1 à 2 mm) à la hauteur h. Le principe d’emploi des
cavaliers est donné par la figure 11 (les dimensions ne sont pas à
l’échelle).
|
|
|
Les cavaliers sont situés de part et d’autre de la lentille à
régler, à une distance égale au double de la focale f. La lentille
intercepte par toute sa surface le faisceau lumineux émis par la diode A
et en donne en A’ une image inversée de même grandeur ; h’
étant inférieure à h A’ est au-dessus du point de référence
du cavalier et en est distant du double de la différence des hauteurs.
La droite AA’ passe par le centre optique de la lentille. On
règle par tâtonnement le système en surélevant de façon égale chacun des
cavaliers, par exemple en collant sous leur base des couches de bristol
successives, jusqu’à obtenir la coïncidence de l’image B’ de la LED
(maintenant en B) avec la croisée des axes. Les deux cavaliers sont
alors réglés à l’exacte valeur de h (sans qu’il soit nécessaire de
mesurer cette valeur).
|
|
Première remarque :
l’image de la LED est un cercle très net (5 mm de diamètre) que l’on doit
pouvoir centrer à moins de ½ mm près sur la croisée des axes. Ceci
correspond à une précision sur la position de la droite BB’, « axe
des centres », meilleure que le 1/20 de degrés.
[3]
|
|
Deuxième remarque : ce
dispositif ressemble à celui qui emploie un rayon laser, mais en apparence
seulement. Il en diffère fondamentalement par la non matérialisation de
l’axe passant par le centre de la lentille, la définition de ce dernier,
implicite et très précise, résulte des positions de l’objet et de son image,
sans qu’il soit besoin de repérer physiquement le centre de l’optique. C’est la lentille qui prend en charge la
détermination de sa propre position…
------------------------- |
A 80 cm (4 f pour 5 dioptries) la précision relative est de 1/1600 ; or
1/1000 (radian) = 1/20 (degré).
--------------------------- |
|
Ajustement des axes optiques
On utilise ici la réflexion parasite sur le 2ème
dioptre de la lentille fonctionnant en miroir concave (figure 12). Cette
réflexion s’observe d’autant plus facilement que la puissance de la LED est
grande et que l’ambiance lumineuse générale est sombre.
On détermine dans un premier temps la distance aussi exacte que possible qui
sépare le centre optique apparent du miroir concave de la lentille en
plaçant le cavalier actif directement devant cette dernière. Cette distance
est généralement légèrement inférieure à une dizaine de cm. L’image de la
LED, très proche du centre apparent C, est toujours un cercle
lumineux aux bords nets mais de dimension réduite.
|

|
|
On peut alors
procéder à la fixation définitive de la lentille, par exemple en utilisant
une colle à prise rapide (du type « Résiste à tout », fixation définitive
assurée en moins de 10 minutes). Cavalier en place sur la ligne de foi,
platine en contact avec la pointe 1, on règle sa position pour que
l’image de la LED se place au point a du cavalier. La lentille est
alors bien en direction mais pointée en inclinaison vers le haut. En la
maintenant rigoureusement en place, on fait glisser légèrement le cavalier
perpendiculairement à la ligne de foi pour amener le spot en b (si
l’axe auxiliaire est à 8 mm de l’axe principal ce déplacement sera de 4 mm).
On abaisse alors le spot en c en inclinant a lentille qui est alors à
son poste définitif. On opère de même pour l’autre lentille.
|
|
Mise en place du miroir
Le plateau sur la surface de travail, on place
les deux cavaliers en face de chaque lentille sur la ligne de foi
correspondante mais cette fois-ci à la distance d’une focale f. On
met en position le miroir et tout en l’appuyant sur la pointe 2 on
l’oriente avec son support en direction et en inclinaison pour que l’image
de la LED soit à la croisée des axes du cavalier passif. Quand sa position
est définitivement assurée on le fixe en plaçant à ses 4 coins une goutte de
gel silicone.
|
|
Montage du plateau
Le plateau est définitivement monté sur un
socle muni d’un système de réglage en hauteur sur 3 points. Il est commode
d’en placer 2 sur une ligne parallèle à l’axe de projection (axe des
centres) et le 3ème sur la médiatrice du segment défini par les
deux premiers (points 1,2 et 3).
|
|
La réalisation de
l’instrument ne demande pas un relevé de mesures exactes. Les seuls
instruments de précision nécessaires sont la règle plate et le stylo à
pointe fine.
|

|
|
|
Figure 13 |
|
Mise en place du plateau de transfert
La mise en place est faite de la façon
présentée précédemment dans le corps du tutoriel. Le plateau étant ici
utilisé « à ciel ouvert » (la protection du miroir, élément fragile, est
assurée par un capot amovible) des mires de centrage ont été dessinées sur
ordinateur et imprimées sur rhodoïd pour rétroprojecteur afin de pouvoir
être glissées derrière chacune des lentilles.
|
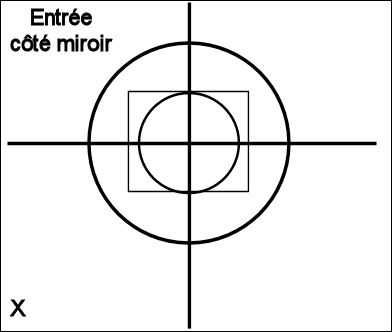 |
Figure 14
Mire d’entrée.
|
 |
Figure 15
Mire de sortie
|
|
|
|
Dégrossissage
En s’aidant de papier calque glissé
alternativement entre chaque lentille et sa mire on agit sur les points de
réglage 1 et 2 de façon que le faisceau lumineux soit
correctement centré tant à la sortie qu’à l’entrée. Le point 3 permet
de régler l’inclinaison des bords du cadre de l’image.
|
|
Réglage fin
En plaçant l’œil sur l’axe lumineux et à une
distance suffisante de la lentille de sortie on constate que le faisceau
s’inscrit dans un trou circulaire qui le limite. Ce cercle est l’image de
l’iris de l’objectif, derrière lequel se profile l’image du cadre image
(généralement il n’y a pas d’iris spécialement placé à l’intérieur de
l’objectif, sa lentille d’entrée en jouant le rôle). On place l’œil à la
distance permettant l’encadrement par ce cercle du cercle épais figurant sur
la mire d’entrée. On recherche la superposition exacte par réglage des
points 1 et 2, tout en vérifiant que le cadre est toujours
bien en place (en approchant l’œil de façon à le voir en entier).
|
|
Mise en place du caméscope
La figure 16
ci-contre représente un calque rhodoïd taillé aux dimensions de l’écran de
visée du caméscope. On place alors ce dernier de façon que toutes les images
soient centrées sur cet écran.
|
 |
|
|
|
|
|
|
Jojonase
|
Annexe III |
|
|
|
Tachymétrie par caméscope |
|
|
|
|
|
Pour éliminer le battement lumineux provenant des différences de fréquence
image ciné et vidéo il peut être nécessaire d'avoir soit une mesure précise
de la vitesse du projecteur, soit une visualisation afficace du phénomène.
Je propose une méthode utilisant à cet effet le caméscope lui-même. Cette
méthode :
- est gratuite, simple, pratique et rapide ;
- s'applique sur le banc dans les conditions normales du transfert -
projecteur allumé et en marche, film en projection ;
- elle est précise et d'autant plus exacte qu'elle utilise la base de temps
du caméscope ;
- elle ne nécessite aucun accessoire supplémentaire.
Son principe découle de la nature même du battement, modulation de la
luminosité résultant directement de la modulation des temps de charge réels
du capteur.
Si T est la période trame et f la fréquence trame, T = 1/f
= 1/50 s : c'est le créneau de charge vidéo.
Soit T ' la période ciné comparable définie comme le temps de
passage de 2 pales successives. Cette période comporte 2 phases (obscure et
éclairée) à peu près égales.
Le projecteur à 3 pales tournant à la vitesse v (i/s), on a T ' =
1/3v, que l'on peut aussi écrire :
T ' = 1/f ' = 1/(f+n). Par exemple, à 18 i/s, T ' = 1/54 s avec n =
4.
Cette différence des périodes T et T ' induit une différence
des temps de charge réels suivant que le créneau trame débute pendant
la 1/2 phase obscure ou pendant la 1/2 phase éclairée
(voir graphes page suivante). Il en résulte une modulation rectangulaire du
temps de charge moyen par trame, dont la fréquence est n = f ' - f
, et l'amplitude T – T ' (noter que ces données ne dépendent
que des vitesses et pas de la largeur des pales).
|
|
Si on règle l'obturateur du caméscope sur une vitesse plus élevée, la charge
du capteur ne commence plus au début du créneau mais en fin de créneau.
Par exemple, au 1/250, 4 ms avant le changement de trame. La charge du
capteur ne se produit alors que pendant les séquences telles que la période
trame se termine pendant la 1/2 phase éclairée. On n'a plus de
modulation de luminosité, mais une interruption totale de l'image, à
la même fréquence n. D'où la méthode :
* Le matériel de transfert étant en place sur le banc et ayant tourné
suffisamment pour que la température d'équilibre soit atteinte, on place une
cassette (ou tout autre moyen d'enregistrement) dans le caméscope, disposé
en pause d'enregistrement, vitesse supérieure au 1/100, grande ouverture en
manuel.
* on met le projecteur en route, et dès que la fréquence des occultations
parait stabilisée on lance l'enregistrement, pour une dizaine de secondes.
* on visionne l'enregistrement à vitesse lente pour compter les
occultations entre 2 time-codes et en déduire le nombre par seconde n
.
* on fait f ' = 50+n et la vitesse du projecteur est v =
1/(50+n)
|
|
Exemple : on compte 31 occultations entre 00 00 07 12 et 00 00 14
03
Les 2 derniers chiffres étant des images, on les multiplie par 4 pour avoir
les 1/100 de s.
Le temps écoulé est donc 14,12 - 7,48 = 6,64 s.
n est 31 : 6,64 = 4,67 et la vitesse du projecteur au 1/50 est 54,67 : 3 =
18,22 i/s
A 24 i/s, 2 pales, le procédé est exactement le même; la formule à appliquer
étant v = 1/(50 - n) .
Noter que cette valeur 1/(50 + ou - n) est la valeur de vitesse à afficher
lorsqu'on utilise la méthode Clearscan - suppression des battements
par réglage de la vitesse du caméscope sans toucher à celle du projecteur.
|
 |
|
|
|
|
|
|
|
|
|
|
|